
Quadruped V1 Update 2

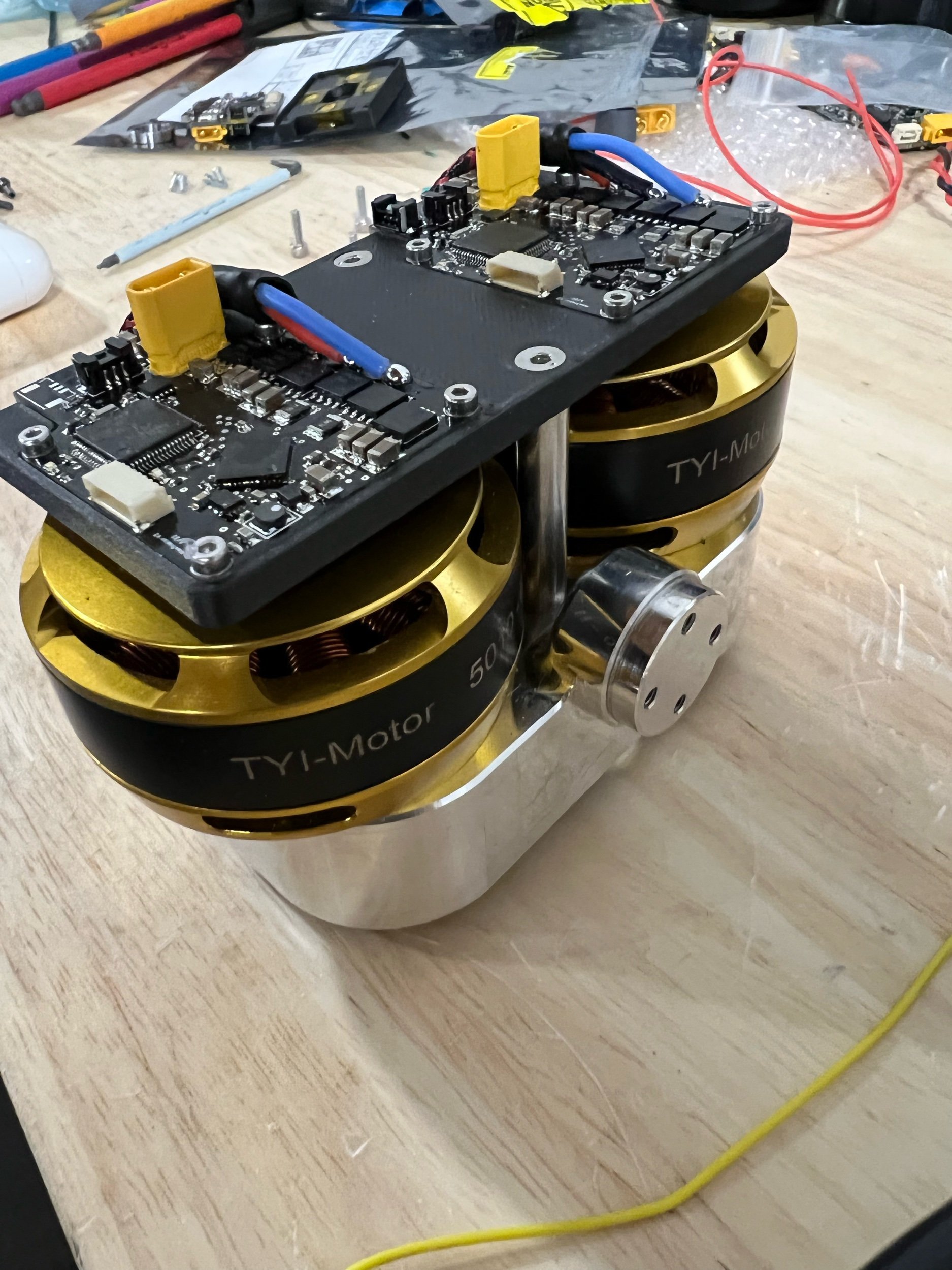
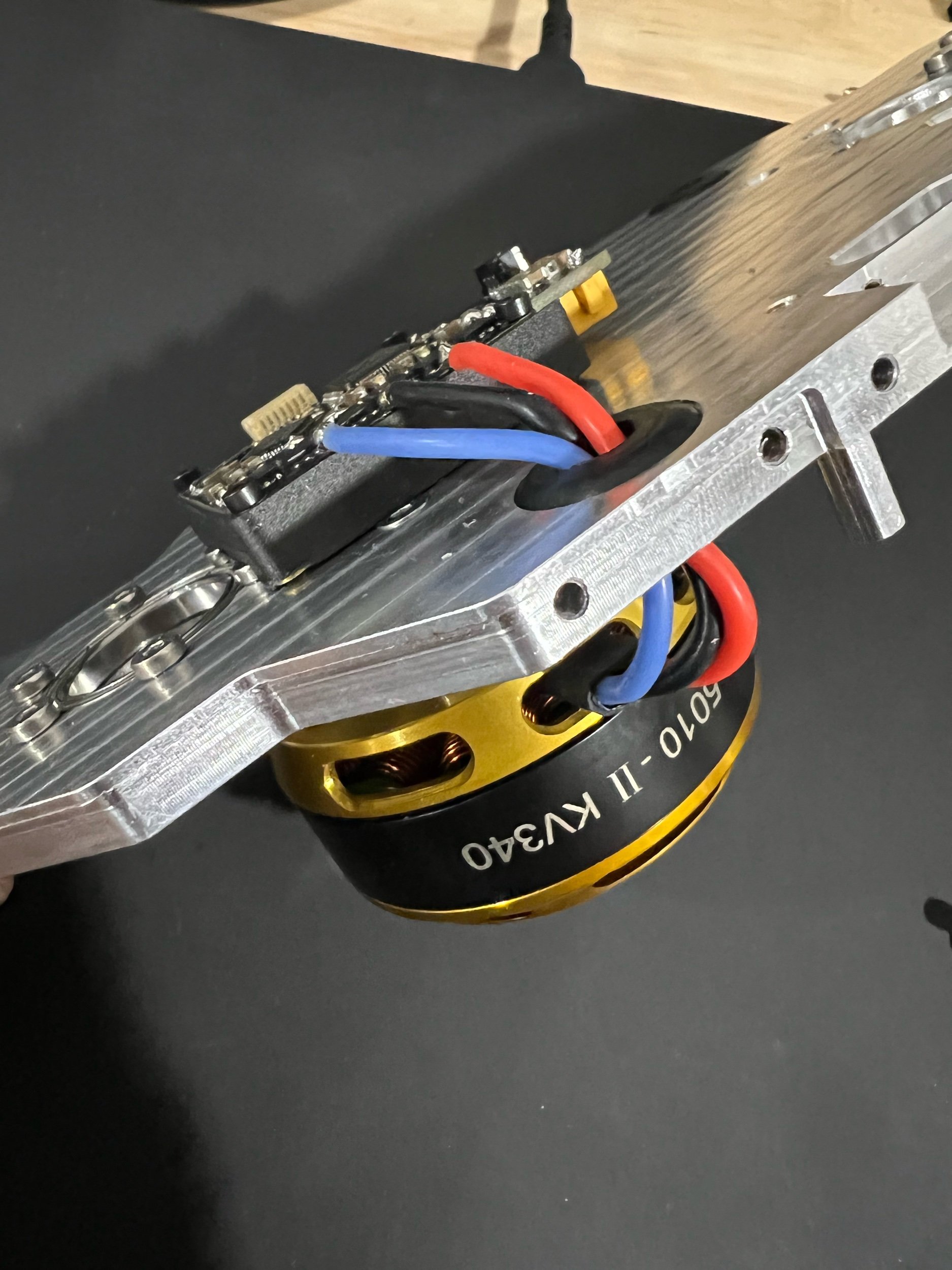
I was having reliability problems with the COTS G4 based controllers and external encoders I had originally used on this quadruped and so I decided to replace them with custom controllers with on-board encoders. Conveniently I was able to get away with almost all of the same mechanical bits as the original design, and the controllers mounts were just printed.
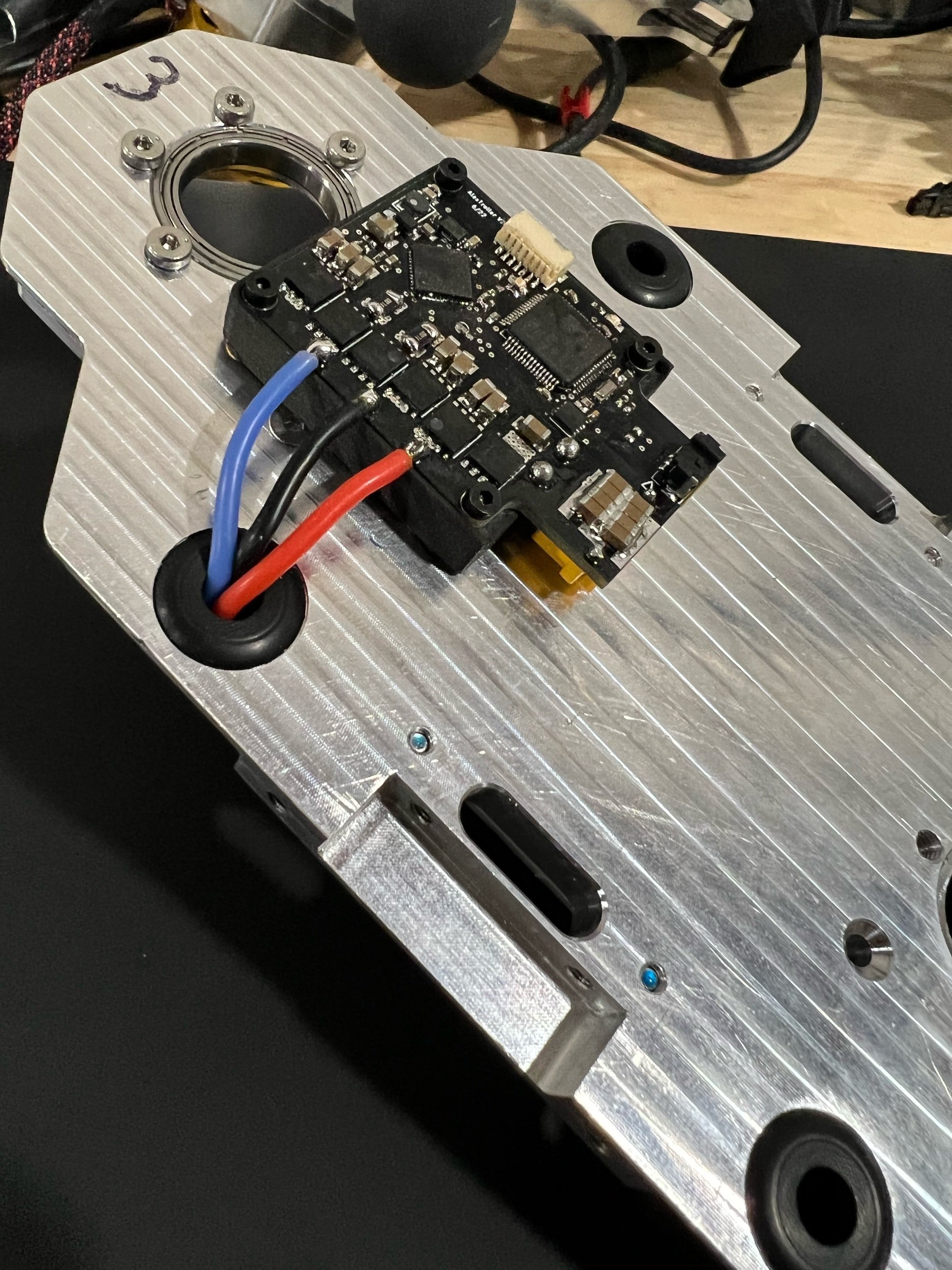
The board is based off the mini cheetah controller, with changes made to include the ICs I had on hand (in particular hardware configured DRV chip instead of the SPI configured one).

Because some of the ICs were reclaimed from old boards, I had to do the assembly myself. Probably wouldn’t want to assemble 12 controllers myself again…
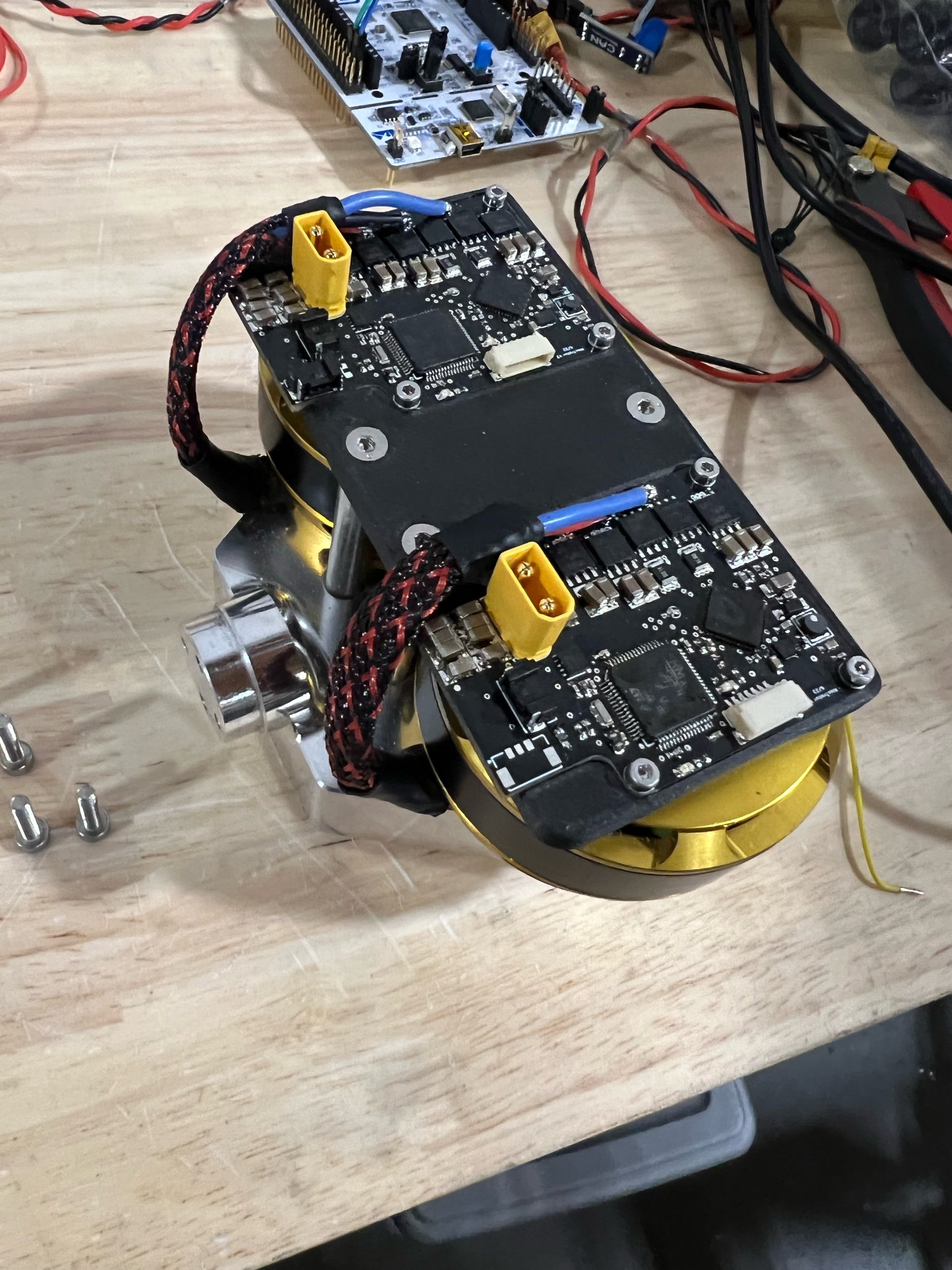


Robot reassembled

Robot communicating with the UP board, indicating the new cube based SPIne firmware and CAN are all working.