
Stride Pro Mini

Ever since I first brought Stride out, I’ve wanted a smaller, less bulky version—something I could just toss in my backpack. After working with the small QDD modules on Pupper V3, I decided it was finally time to build a more compact wheeled biped, which I started calling Stride Mini.
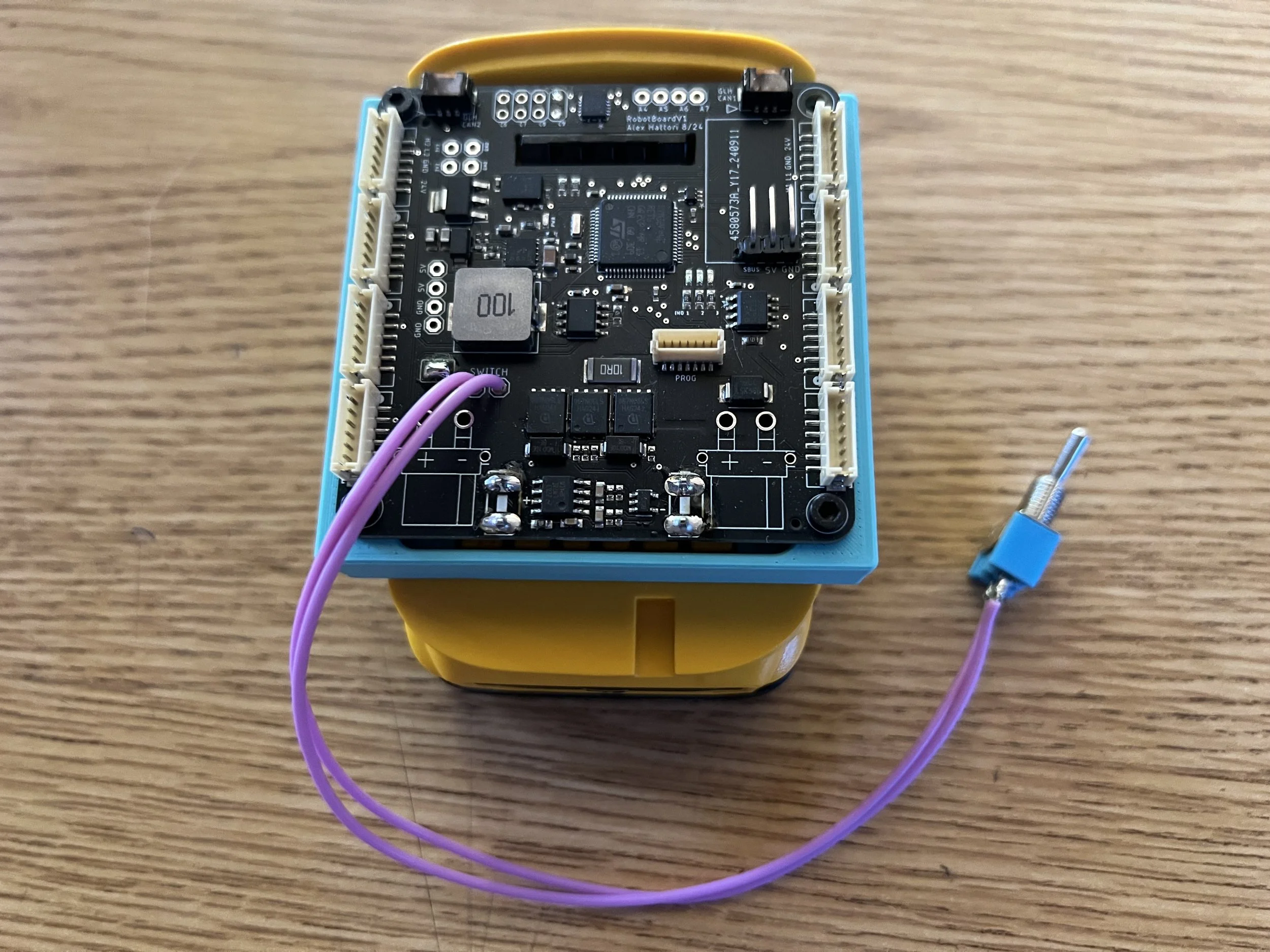
I began by designing a new robot control board around the Dewalt DCBP034, basically the smallest 24 V drill battery available. The board includes an STM32F446, two CAN buses, a precharge circuit, an IMU, voltage regulators, and an RC receiver—the bare essentials for controlling a robot.
I had already designed my own controllers for the GIM4305s while working on Pupper, so I reused those to control the robot. For the wheels, I went with the same generic 5010-sized (rotor) motors I had been using on my swerve drives.

I printed the robot and had a working version within about a week of receiving the boards. For this prototype, I used a combination of laser-cut aluminum flat parts from Fabworks for stiffness, along with nylon and PLA+ prints. One non-conventional choice I made with the wiring was using a star topology for the CAN bus. Normally that’s avoided, but because the robot is so small, all the stubs were under 12”, which still satisfies the CAN standard. This made wiring easier since I could just use premade JST cables.
After getting the initial version running, I finished reviving my mill and built a machined version with a linkage knee. I also added a few quality-of-life improvements, like fixing “the” screws and integrating joint hard stops.






Stride for scale.
All the code runs directly on the microcontroller, which means the robot boots instantly.
It works, it’s small—mission accomplished. Now it’s time to move on to some bigger and more interesting robots!