
FRC 2025 (as a mentor)
A bit of an explanation why I didn’t make any significant progress on my personal robots in the early part of 2025 😛
For the past few years, I’ve been mentoring my former high school’s FRC team, Team 1197—the Torbots. It’s been incredibly rewarding to watch the students grow into engineers, starting as shy underclassmen who quietly sneak in to eat a snack and do some filing, and eventually becoming the driving force of the team by the time they’re seniors. It’s a journey I know well—I’m the engineer I am today largely because of my own experiences in FRC back in high school.
This year went particularly well 🙂

This year I took on the role of lead technical mentor for the team. I started by gathering the core group of students and asking them to discuss what they wanted out of the season. They came up with goals like qualify for championships, teach underclassmen new skills, and grow the program. As a group we developed a clear, prioritized set of goals for the season.
The team had been in a bit of a drought when it came to qualifying for world championships. Our robots had been moderately competitive over the years, but California regionals are notoriously tough, and the team hadn’t qualified since 2018. As a result, the students’ number-one goal was clear: qualify. (The second-highest priority was underclassmen growth—but as you can tell, this year’s group leaned competitive.)
That set the stage for the season. To meet our top goal, we had to either win the LA regional or at least become finalists. Achieving that meant leaning on two of our biggest tools: creating a schedule—and sticking to it.
In FRC, teams nominally have six weeks to build a robot. In practice, many procrastinate early on and end up scrambling right before competition. This usually leaves little time for programming, almost no time for the drive team to practice, and very limited opportunities to test hardware and refine designs.
Students are often full of great ideas and can solve wonderfully difficult engineering challenges, but they usually don’t have experience with project management. That’s where I found I could help the most—guiding them to set realistic deadlines, coordinating design and manufacturing, organizing part orders and shipping to minimize downtime, and avoiding “design whiplash” from constant changes.
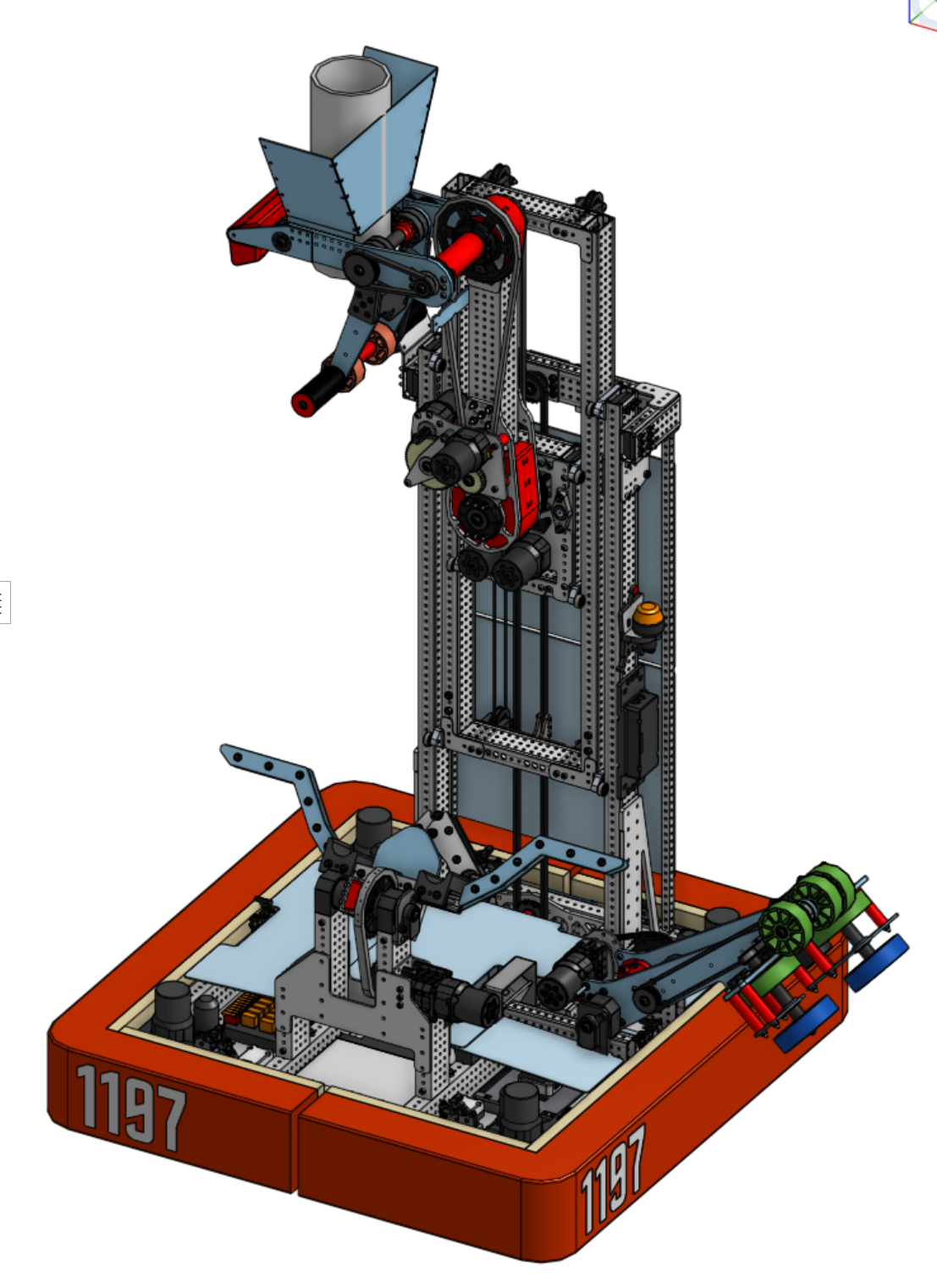
On the mechanical side, we committed to an aggressive timeline. Time blurred together, but by the end of week 4 we had the competition robot’s hardware completed and ready for the software and drive teams—something that had never happened in the team’s history. Because of how our competition schedule lined up, this gave us four full weeks before the event to practice and refine.
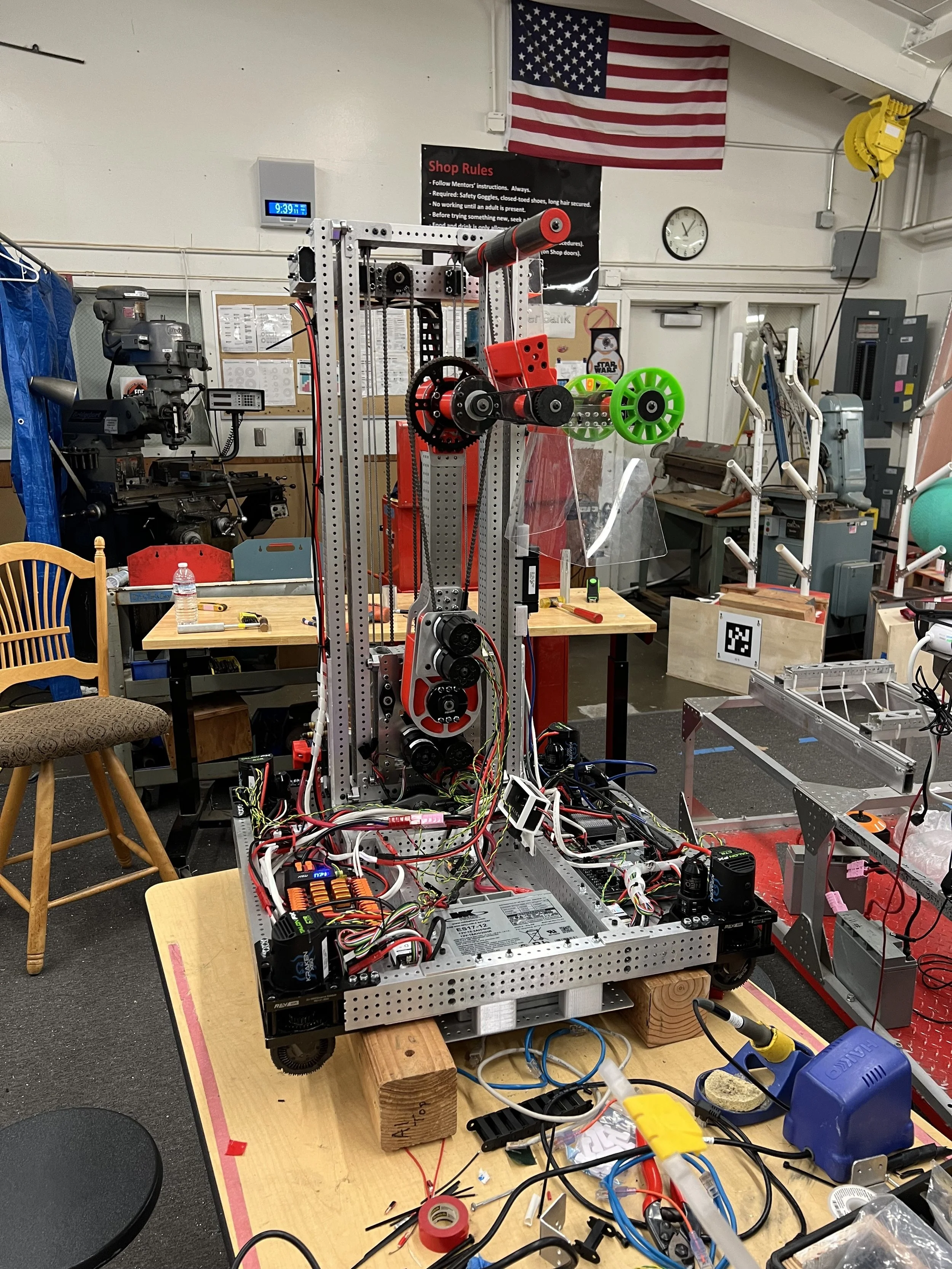
We placed a big emphasis this year on attention to detail and taking pride in one’s work—and by the end of the season, that mindset had really taken hold. Students faithfully applied Loctite to every bolt, modeled every fastener in CAD, and even held each other accountable for lapses in focus. The mechanical team routinely hit tolerances of ±0.010” on most parts (with grungy high school shop tools). The software team kept a living bug log, giving them a clear roadmap for fixes and improvements. The electrical team wired each robot iteration cleanly the first time, with no need for rework.
That collective discipline paid off. Across three grueling events, the robot suffered only a single minor issue: a motor controller died when a ring terminal snapped off the board—but thanks to drivetrain redundancy, the robot finished the match with just a bit less speed.
Just as important as mechanical robustness was performance reliability. In the first 15 seconds of each match, the robot runs autonomously, scoring valuable bonus points. Across all three events, it missed only around 3 out of 129 autonomous runs—and some of those misses were caused by other teams’ rule violations, not our robot. During teleoperated play, it maintained a similar success rate over roughly 500 attempts. That level of consistency came directly from the students’ relentless cycle of practice, tuning, and refinement throughout the build and competition season.
Here’s a video one of our students put together, released the night before the LA Regional.
All of this culminated in the team winning the LA Regional—going undefeated in the playoffs—finishing as Finalists at the Central Valley Regional, and ranking 3rd in our division at the World Championships. Individually, based on statistics, the team’s robot was around the 26th best in the world out of roughly 4,000 teams. The team also won the Autonomous Award at both regionals for having the most sophisticated and reliable automation.
This success feels great for the team in the moment, but it also helps the program grow. New students get excited when they can be part of something that achieves tangible results, so having pockets of success like this year is important.
The team seems to be on an upward trajectory, and I’m hopeful that this season will give them momentum in the years ahead to continue thriving.
